|
|
|
Copyright © 2004 by the author(s). Published here under license by The Resilience Alliance.
The following is the established format for referencing this article:
Riitters, K., J. Wickham, and J. Coulston. 2004. Use of road maps in national assessments of forest fragmentation in the United States. Ecology and Society 9(2): 13. [online] URL: http://www.ecologyandsociety.org/vol9/iss2/art13/
A version of this article in which text, figures, tables, and appendices are separate files may be found by following this link.
Report Use of Road Maps in National Assessments of Forest Fragmentation in the United States Kurt Riitters1, James Wickham2, and John Coulston3
1U.S. Forest Service; 2U.S. Environmental Protection Agency; 3North Carolina State University
- Abstract
- Introduction
- Methods
- Results for an Example Landscape
- National Results
- Discussion
- Speculation
- Summary
- Responses to this Article
- Acknowledgments
- Literature Cited
The question of incorporating road maps into U.S. national assessments of forest fragmentation has been a contentious issue, but there has not been a comparative national analysis to inform the debate. Using data and indices from previous national assessments, we compared fragmentation as calculated from high-resolution land-cover maps alone (Method 1) and after superimposing detailed road maps (Method 2). There was more overall fragmentation with Method 2. However, because roads were often adjacent to other nonforest land cover, Method 1 typically detected > 80% of the forest edge and > 88% of the fragmentation of core, i.e., intact, forest that was detected by Method 2. Indices based on individual patch size changed much more for Method 2; for example, area-weighted average patch size was typically 50–90% smaller. The relative geographic distribution of core forest was the same for both methods. Our results emphasize that the question of incorporating road maps must consider the purpose of the assessment, the characteristics of the data, and the relative sensitivities of indices to different patterns of fragmentation. As a practical matter, unless road-caused fragmentation is of special interest, land-cover maps alone may provide an adequate representation of the geography of forest fragmentation.
KEY WORDS: United States, ecological assessments, land-cover maps, landscape patterns, road maps, forest fragmentation.
Published: November 18, 2004
Although roads are pervasive in the continental United States (Forman 2000, Riitters and Wickham 2003) and can have deleterious effects on ecosystems (National Research Council 1997, Forman and Alexander 1998, Spellerberg 1998, Trombulak and Frissell 2000, Forman et al. 2002), the question of incorporating road maps into national forest fragmentation assessments has become contentious (e.g., Shouse 2002). Recent debate in the United States has centered on the production of two national assessments (Heinz Center 2002, U.S. Forest Service 2004) in which forest fragmentation was one of several indicators of forest conditions and sustainability. Ultimately, both fragmentation assessments were based on high-resolution land-cover maps alone and did not incorporate road maps into the analyses.
At some risk of oversimplifying a complicated discussion, the debate was not about the data that were used for the assessments, but rather about the types of inferences that were expected to come from the assessments. If roads are perceived to be a particularly important cause of fragmentation, then an assessment that does not incorporate road maps is potentially incomplete. On the other hand, incorporating only road maps potentially ignores fragmentation by other linear features such as streams and power transmission corridors, in which case the assessment is inconsistent. In other words, is the purpose of an assessment to accurately describe road-caused fragmentation, or to consistently describe forest fragmentation without regard to its cause?
The conterminous United States contains approximately 6.3 x 106 km of public roads of all types (U.S. Department of Transportation 2002), and approximately 80% of all land is within 1 km of a road (Riitters and Wickham 2003). Thus, if road-caused fragmentation is of special interest, the pervasiveness of roads is a good reason to consider incorporating road maps into national assessments. At the same time, there is a comparable length, i.e., approximately 5.3 x 106 km, of streams and rivers (U.S. Environmental Protection Agency 2002) that also pervade forested ecosystems. Thus, if interest centers on fragmentation without regard to cause, including road maps but not stream maps potentially ignores almost half of the fragmentation from linear features.
There is agreement that national assessments of forest fragmentation must be conducted by using land-cover maps derived from satellite images. Maps are required to measure spatial pattern indices that describe fragmentation, and no other data source provides nationally consistent maps of forest cover suitable for measuring forest indices. On satellite images, a linear feature, e.g., a road or a stream, is invisible if it is under a continuous forest canopy or if the canopy gap that it creates is too small to be resolved or "seen" by the satellite sensor. As a result, "subpixel" canopy gaps created by linear features are not shown on land-cover maps derived from satellite images. A common way to incorporate road maps is to superimpose them on land-cover maps and change to nonforest the forest pixels that contain at least one road segment (Heilman et al. 2002). The change in fragmentation clearly depends on the spatial coincidence of forest and roads. It is difficult to identify all road-caused fragmentation in this way because other fragmenting land-cover types, e.g., agricultural lands, urban areas, may be located between roads and forest (Fig. 1).
|
Fig. 1. Panoramic view of Quinnimont and Grandview Sandbar (New River Gorge National River, West Virginia, USA). The forest fragmentation associated with the main road is detectable on land cover maps because the adjacent nonforest parcels are large enough to be detected on satellite images. The "subpixel" canopy gaps created by the unpaved road along the far shore of the river are too small to be detected. The national road map identifies more roads than are visible in this photograph, but it does not show the railroad along the near shore or the unpaved road along the far shore of the river. Photograph by Frank Sellers, courtesy of the National Park Service.

|
Methods to increase subpixel resolution and incorporate ancillary data into land-cover mapping received early attention (e.g., Skole and Tucker 1993) and are often aimed at improving forest area estimates (e.g., Achard et al. 2001, Foody 2003, Rogan et al. 2003, Mertens et al. 2004, Powell et al. 2004). Fragmentation depends on the spatial arrangement of the forest and is particularly sensitive to the spatial and thematic resolution of the input map (e.g., Turner et al. 1989). In principle, fragmentation cannot decrease as the forest is mapped in greater detail, for example, by resolving subpixel features, by superimposing road or stream maps, or by recognizing more classes of forest. An assessment of fragmentation is contingent on the observation scale (sensu Allen et al. 1987) of the input map, and the results are a lower limit to the degree of fragmentation that would be measured on a more detailed map.
The selection of fragmentation indices is an important aspect of assessment protocols. The many available indices have different sensitivities to linear features (Gustafson 1998), and there are a number of other conceptual and methodological issues pertaining to the use of spatial indices (Wu and Hobbs 2002). Bissonette and Storch (2002, 2003) and Bogaert (2003) discussed many of the factors that prevent the identification of a single "best" index for national assessments. National ecological assessments typically use a small number of indices (e.g., National Research Council 2000). However, more than a few indices are needed to address questions about fragmentation across a range of disciplinary perspectives, e.g., wildlife, recreation, water, that require different types of indices, e.g., size, shape, distance, and/or juxtaposition, at multiple scales of observation (Bissonette and Storch 2002, 2003). The selection can be simplified if the assessment questions are narrowly defined and the specific relationships between ecological pattern and process are known (Bogaert 2003). Index selection is expected to be easier for an assessment that focuses on road-caused fragmentation.
The effects of incorporating road maps have usually been examined in local circumstances, i.e., geographic location, input data, fragmentation index, and ecological end point. For example, in a study of wildlife habitat in southern Wyoming, Reed et al. (1996) found a 179% increase in the number of forest patches and a 20% increase in the length of forest edge by incorporating road maps compared to using land-cover maps alone. In a national study that incorporated road maps, Heilman et al. (2002) analyzed 72 fragmentation indices on land-cover maps but considered only forest-dominated regions and did not examine the incremental effect from road maps in the analysis.
Because there has not been a comparative national study, this study repeats the assessment protocols of the Heinz Center (2002) and the U.S. Forest Service (2004), except that this time detailed road maps are incorporated. We evaluate the degree and location of incremental changes in forest edge from incorporating road maps, and how different fragmentation indices change when road maps are superimposed on land-cover maps. We address the practical question of whether continental-scale geographic patterns of core, i.e., intact, forest change as a result of incorporating road maps, and include a reconciliation of previous estimates of core forest from Heilman et al. (2002) and Riitters et al. (2002). This comparative analysis will not resolve the debate about incorporating road maps, but it will help to place it into a broader context that considers the purpose of national assessments, the characteristics of the input data, and the selection of fragmentation indices.
We defined two methods for the fragmentation analyses by using two sets of input data. In Method 1, fragmentation was measured on a forest-nonforest interpretation of the National Land-Cover Data (NLCD) national land-cover maps (Vogelmann et al. 2001). The NLCD maps were derived from satellite imagery with a spatial resolution of 0.09 ha/pixel (30 m), yielding approximately 9 x 109 pixels for the conterminous United States. The 21 NLCD land-cover classes were combined into forest, nonforest, and missing classes; details of these will be provided later.
In Method 2, fragmentation was measured on the same land-cover maps after superimposing detailed national road and street maps (Geographic Data Technology 2002) that show approximately 1 x 107 km of road. This is more than the official estimate of the total length of public roads (U.S. Department of Transportation 2002), because the maps include additional classes of roads such as private access roads and driveways in rural areas, small service roads or alleys in urban areas, and forest access roads. Although there has not been a national accuracy assessment of these road maps, it can be said that the maps do not show all roads and that the accuracy is probably lower for unpaved roads and trails in rural areas, e.g., trails for four-wheel-drive vehicles and logging roads, compared with roads that carry more traffic. When superimposing road maps, we converted all the forest pixels that contained at least one road segment to nonforest pixels. No distinctions were drawn between type of road, traffic volume, or other factors.
Of the approximately 2.78 x 109 forest pixels identified by Method 1, approximately 4% (~ 0.11 x 109) were converted to nonforest pixels by superimposing the road maps in Method 2. Although it is problematic to convert that number of pixels to road length, the converted pixels represent roughly 3 x 106 km of subpixel roads, not detected in the satellite images, that were in forest land cover on the land-cover map. Assuming that this estimate is accurate, it can also be said that roughly two-thirds of the total length of the roads on the road maps is portrayed as nonforest on the land-cover map alone; at issue is the fragmenting influence of the remaining one-third.
MeasurementsWe used two devices to measure fragmentation indices on the maps defined by each method. The first device was a moving-window algorithm based on the same protocols (Riitters et al. 2002) that were used by the Heinz Center (2002). Briefly, each forest pixel was classified according to the percent forest within a surrounding square window for window sizes of 2.25 ha (5 pixels x 5 pixels), 7.29 ha (9 pixels x 9 pixels), 65.61 ha (27 pixels x 27 pixels), 590.49 ha (81 pixels x 81 pixels), and 5314.41 ha (243 pixels x 243 pixels). For this measurement device only, the water, snow/ice, and bare rock/sand/clay/talus land-cover classes were treated as missing values.
For a given window size, "core" forest was defined as a forest pixel that was surrounded by a completely forested window, "interior" forest was surrounded by a window containing at least 90% forest, and "dominant" forest was surrounded by at least 60% forest. Note that these fragmentation categories are not mutually exclusive. This measurement device also yields estimates of distance to nearest forest edge, because core forest is by definition a certain minimum distance from the nearest forest edge, and that distance varies with window size. For its assessment, the Heinz Center (2002) reported the percentage of all forest pixels that were classified as "interior" for three window sizes.
The second measurement device was a standard tiling procedure by which the land-cover maps were first subdivided into nonoverlapping 56.25 km2 analysis units. We used the same protocols (Riitters et al. 2004) as the U.S. Forest Service (2004). In these protocols, the arbitrary choice of analysis units was designed to permit later aggregation of results by watersheds or catchments, ecoregions, or administrative regions, and it was recognized that some indices were sensitive to the definition of analysis units (e.g., Jelinski and Wu 1996, O'Neill et al. 1996). Briefly, within each analysis unit that contained forest, i.e., 127,012 units in Method 1 and 126,908 units in Method 2, we calculated the length of forest edge, the number of forest patches, area-weighted average forest patch size, and average nearest-neighbor patch distance between forest patch perimeters. No land-cover types were treated as missing values for these measurements. For its assessment, the U.S. Forest Service (2004) reported area-weighted average patch size, average nearest-neighbor distance between patches, and overall forest edge:area ratio.
To illustrate several aspects of the analysis that will later help to interpret the national results, a representative set of patch-based fragmentation indices was measured by both methods in an example landscape centered on the Raleigh-Durham International Airport (Feature "B" in Fig. 2). To show several typical situations, this landscape is approximately five times larger than the analysis units that were used for the national analysis. Furthermore, this landscape contains a higher than average density of subpixel roads to magnify their effects on the fragmentation indices. The locations of some roads are visually apparent as linear nonforest, e.g., urban or agricultural features on the land-cover map. Subpixel roads include all the roads within the forested William B. Umstead State Park (Feature "D"). Many small forest patches were eliminated in residential areas (Feature "F") where trees are directly adjacent to roads, and many new patches were created in mostly forested areas (Features "A" and "D"). The example shows that even the largest roads through forests (Features "C" and "E") are not strictly continuous features on land-cover maps.
|
Fig. 2. The example discussed in the text is based on land cover and roads near Raleigh-Durham airport (North Carolina). The two maps at the top of the figure illustrate Method 1, and the two maps at the bottom of the figure illustrate Method 2. Upper left: generalized land-cover map. The labeled features are: (A) Research Triangle Park, (B) Raleigh-Durham airport, (C) interstate highway 40, (D) William B. Umstead State Park, (E) U.S. highway 70, and (F) the residential district of Raleigh. Lower left: land cover with road map superimposed. Upper right: forest vs. nonforest from map of generalized land cover. Lower right: forest vs. nonforest from map of land cover with roads superimposed. The fragmentation indices shown in Table 1 were calculated from the forest-nonforest maps (upper right and lower right).

|
Superimposing the road map eliminated 8.7% of the forest (Table 1), indicating that there were roughly 500 km of subpixel roads in this landscape. All but one of the fragmentation indices exhibited percentage changes larger than 8.7%, generally indicating that the incorporation of road maps had more effect on forest fragmentation than on forest area. With Method 1, the largest patch was 11,487 ha and included 67.8% of all the forest on the map. With Method 2, the largest patch was 947 ha and included only 6.1% of the total forest area. Compared to Method 1, average patch size decreased by 35.9% and the number of patches increased by 42.3% for Method 2. Although superimposing the road map eliminated many small patches in residential areas, there was a 31.1% net increase in the number of small patches ≤ 0.36 ha, i.e., 4 pixels. These large changes in the number and size of forest patches generally indicate the pervasiveness of the road network.
|
Table 1. Forest fragmentation indices in the vicinity of the Raleigh-Durham airport (see Fig. 2). Method 1 is without road maps superimposed, and Method 2 is with road maps superimposed on the land-cover map. The changes from superimposing roads are expressed as percentages. See Riitters et al. (2004) for measurement protocols. The indices are sorted by the absolute value of percent change.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Because of the larger number of patches for Method 2, the total length of the distance between all nearest-neighbor patches increased by 38.3% compared to Method 1, but the average nearest-neighbor distance decreased by 2.8%. The decrease occurred because the forest patches that were created by the superimposed road map were exactly 1 pixel, i.e., 30 m, apart, which was less than the original average distance (56.4 m) between forest patches for Method 1. Although the total amount of forest edge and the overall edge:area ratio increased by 11.4 and 22.0%, respectively, for Method 2, average patch edge:area ratio decreased by 11.8% because a disproportionate number of small patches with high individual edge:area ratios were eliminated by superimposing the road map. These contradictory results suggest that some patch-based indices may be difficult to interpret at national scale, depending on the specific formulation of the index.
Over a large portion of the conterminous United States, small forest patches were so closely associated with roads that superimposing the road maps eliminated them, and total forest edge decreased for Method 2 in those areas (Fig. 3). Elsewhere, the amount of forest edge from Method 2 that was detected by Method 1 was typically more than 80%, even in forest-dominated areas such as in the Great Lakes region and the southeastern coastal region. However, the rate of detection was often less than 40% in the most heavily forested parts of the country such as the Pacific Northwest coast and the Appalachian Mountains. Heavily forested regions often contain large shares of public forestland where small roads traverse undeveloped landscapes, and, as a result, many of the roads are not detectable on satellite imagery.
|
Fig. 3. The percentage of forest edge from Method 2 (with road maps superimposed) that was the incremental effect of road maps in comparison to Method 1 (land-cover maps alone) varied substantially among regions. "Less edge" indicates that superimposing the road map reduced the total amount of forest edge. Analysis units containing no forest for Method 2 are not shaded.
|
Compared to Method 1, Method 2 either decreased the number of patches or caused a net increase of less than three patches per square kilometer for most of the nation (Fig. 4A). However, many urban areas exhibited increases of up to 30 patches/km2. In nearly all forest-dominated regions, Method 2 resulted in a decrease in the weighted average patch size by an amount equivalent to one-half or more of the area of an analysis unit (Fig. 4B). For Method 1, the mostly forested analysis units contained large percolating patches, i.e., patches that span an entire analysis unit, and superimposing the road maps eliminated almost all these percolating patches. Method 2 increased the average patch size in regions without much forest because many small patches were eliminated. Method 2 generally resulted in a decrease in the average nearest-neighbor distance in regions with at least a moderate amount of forest and increased the average distance only in lightly forested regions (Fig. 4C).
From the moving-window analysis, Fig. 5 shows the percent of all forest area that was labeled as core, interior, and dominant forest for both methods. The change in dominant forest from Method 1 to Method 2 was less than 2.5% for any window size because roads do not typically occupy a large percentage of total area. The largest changes (6–9% of total forest area) were for interior forest. The amount of core forest decreased by up to 6.7% for small windows but was virtually unchanged for larger windows because there was very little core forest even without incorporating road maps. Depending on window size and fragmentation category, 81–100% of the fragmentation detected by Method 2 was detected by Method 1 (Table 2).
|
Fig. 5. The percentage of total forest area in the United States that was labeled as "core" (circles), "interior" (triangles), and "dominant" (squares) forest, for Method 1 (open symbols) and Method 2 (closed symbols), for five window sizes. For any given window size, "core" forest is defined as a forest pixel that is surrounded by a completely forested window, "interior" forest is surrounded by a window containing at least 90% forest, and "dominant" forest is surrounded by at least 60% forest.
|
|
Table 2. The proportion of national fragmentation that was measured after superimposing road maps on land-cover maps that was detected by using land-cover maps alone. For a given window size, "core" forest is defined as a forest pixel that is surrounded by a completely forested window, "interior" forest is surrounded by a window containing at least 90% forest, and "dominant" forest is surrounded by at least 60% forest. The proportion for a given window size and fragmentation category is the ratio of the complements of the values shown in Fig. 5.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
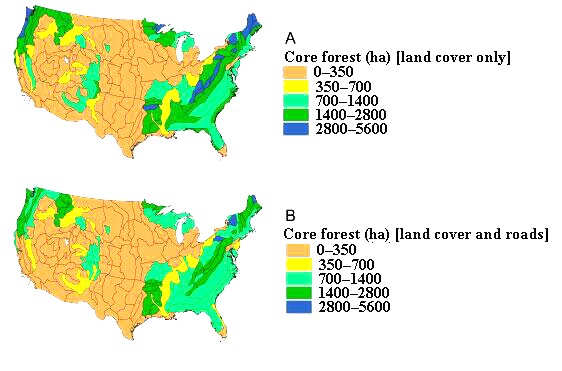
Figure 6 shows the average amount of core forest (7.29 ha windows) per 56.25 km2 analysis unit for each of 164 ecological sections (Bailey 1995). Results obtained for other window sizes (not shown) were similar. Superimposing the road maps reduced the total area of core forest (compare Figs. 6A and 6B). The average reduction was typically less than 250 ha per 5625 ha analysis unit but exceeded 750 ha in five ecological sections. Considering ecological sections with average values of more than 1400 ha of core forest per 5625 ha analysis unit with Method 1, reductions of 20–40% were typical in temperate mountainous sections, whereas reductions of 10–20% were obtained in boreal ecological sections.
|
Fig. 6. Ecological section average amounts of core forest for 7.29 ha windows within 5625 ha analysis units. (A) Method 1, (B) Method 2.
|
Forest patches are smaller and more numerous when road maps are incorporated into the analysis. Roads are continuous, linear features that are connected to other roads in networks designed to pervade ecosystems, thereby creating many patches. Patches defined by roads are not represented very well on the land-cover map, where one patch of forest that is connected by a single subpixel road segment anywhere along a road is split into two patches by superimposing the road map. If road-caused fragmentation is of special interest in an assessment, then indices of patch size and number may be the most effective indices, but only if road maps are incorporated into the analysis. At the same time, some patch-based indices are not very good choices for evaluating incremental fragmentation from roads. For example, decreases in the average nearest-neighbor distance for Method 2 (Fig. 5C) suggests that adding more roads will actually reduce fragmentation, whereas the area-weighted average patch size gives the opposite impression (Fig. 5B).
A desirable attribute of any fragmentation index is that its value should change in a logical direction when additional fragmenting agents are added to the analysis. Furthermore, the changes should be consistent for different places on the map. The observed changes in some patch indices were illogical and inconsistent, even if they could be explained as artifacts of overlaying maps with different resolutions. These issues are not merely academic; the average nearest-neighbor distance and area-weighted average patch size were both used in a recent national assessment (U.S. Forest Service 2004). The discussion about roads must consider how to model them in a logical fashion with real-world data and in light of the selected indices.
Would the differences obtained result in changes in conservation priorities? To address this question, we chose to evaluate the status of core forest as the most likely place to find undisturbed forest-dependent wildlife habitat (U.S. Forest Service 2004). Core forest is a sensitive measure of fragmentation from roads (e.g., Reed et al. 1996, Heilman et al. 2002). Furthermore, when using core forest it is possible to obtain comparable estimates from either a patch-based or moving-window analysis (Riitters et al. 2002), and estimates of change from the moving-window analysis are consistent and logical. Of course, the answer depends upon the level of organization at which the question is posed. At national scale, one answer comes from comparing the distributions of core forest according to ecoregions as in Fig. 6A (Method 1) and Fig. 6B (Method 2).
For this set of assumptions, the overall geographic patterns are very similar. Even though superimposing the road maps reduced the total amount of core forest, in both cases the largest reserves of core forest were along the Oregon-Washington coast; in northern Minnesota, New York, and Maine; and in the Northern Rocky, Ouachita, Ozark, and Appalachian Mountains. Of course, conservation priorities could change dramatically for different assumptions representing different conservation goals. For example, edge forest could be valued more than core forest because of the edge habitat that it provides, or smaller reserves of core forest could be valued more than larger reserves because they represent rare habitats in a given region. Nevertheless, one of the primary motivations for incorporating road maps is the concern for accurately estimating the amount of core forest (e.g., Reed et al. 1996, Heilman et al. 2002).
Because superimposing roads had relatively little impact on core forest area in this study, we must consider the large differences between previous estimates that used the same maps. Using Method 2, Heilman et al. (2002) reported that 34.3% of all forest was more than 90 m from forest edge where edge was defined by roads and by all nonforest land-cover types. That estimate represented a maximum value, because small forest patches and lightly forested regions were excluded. In comparison, Riitters et al. (2002) reported a value of 56.5% using Method 1 and including all forest patches and regions, but excluding "semi-natural" edges defined by the water, ice/snow, and bare rock/sand/clay/talus land-cover types. The present study found a reduction of 5.5%, i.e., from 56.5 to 51.0%, from superimposing road maps (Fig. 5). We attribute the remaining difference of 16.7% (34.3 vs. 51.0%) to fragmentation by the semi-natural land-cover types.
In other words, the incremental fragmentation from semi-natural land-cover types was at least three times larger than the incremental fragmentation from superimposing road maps. This is easy to rationalize; except for lakes, the water land-cover type is a linear feature that should operate similarly to roads in terms of patch definition and impacts on core forest. Furthermore, the snow/ice and talus land-cover types are most often found near or above the tree line in otherwise intact and mostly road-free forests in heavily forested mountainous regions. We conclude that a discussion of recognizing fragmentation from water and high-elevation nonforest land-cover types (e.g., Wade et al. 2003) is at least as important as a discussion about incorporating road maps.
Recognizing that fragmentation assessments are contingent on observation scale and that maps of forest land cover will be more detailed in the future, it is appropriate that national assessments be made in terms of relative fragmentation in different places. Even if it were feasible to make detailed local interpretations in a national assessment, this is best done later in light of particular circumstances, e.g., geographic location, input data, fragmentation index, ecological end point. If only because of the large area considered, a national assessment cannot definitively answer all detailed questions everywhere, but it should at least be consistent and transparent to permit follow-up investigations. In other words, national assessments should be designed to facilitate as many specific ecological interpretations as possible. Multiple-scale protocols are needed for national assessments, not because the answer changes with observation scale, but rather because different answers potentially are all relevant in different ecological circumstances (Wiens 1989, Levin 1992).
Whatever the demonstrated impacts of roads are in specific circumstances, it is not useful to argue the abstract question of whether road maps should be included in national assessments. First there must be agreement upon the purpose of an assessment. If interest centers on road-caused fragmentation, then incorporating road maps seems to be necessary. In contrast to the "standard" procedure of superimposing road maps on land-cover maps, we can suggest three reasons why such an assessment should be based primarily on road maps, with land-cover maps treated as the ancillary data source: (1) roads are mapped in much more detail than land cover, so road maps are more robust to road-caused fragmentation; (2) roads also affect ecological processes in nonforest ecosystems, so assessments of potential road impacts would be more informative; and (3) this would help to solve the subpixel resolution problem as well as the problem of distinguishing fragmentation by roads from fragmentation by land cover adjacent to roads, and the related problem of distinguishing "human" from "natural" causes of fragmentation. The technical problem then becomes one of incorporating land-cover maps into an assessment of fragmentation of all land by roads.
Patch measurements are often motivated by a requirement to estimate core forest, which is typically accomplished in geographic information systems by a "buffering" operation on patches. However, the index of core forest obtained with a moving-window analysis has several features that could result in wider application: (1) it is computationally equivalent to estimates of core forest obtained with buffering procedures, (2) it does not require a priori specification of analysis units and patches, and (3) the approach facilitates multiple-scale analyses of other classes of forest fragmentation, e.g., interior and dominant, in addition to core forest. Patch measurements are also sometimes motivated by a requirement to estimate the perimeter:area ratio. For that purpose, we suggest that overall edge:area ratio in a moving window would be a better choice than average edge:area ratio for a set of patches in fixed-area analysis units.
If interest centers on road-caused fragmentation, then road maps should be incorporated into the assessment, perhaps as the primary data source. Otherwise, land-cover maps alone may provide an adequate representation of the national geography of forest fragmentation, particularly if indices of edge:area ratio or core forest are used. As a practical matter, our experience has been that it is much easier to conduct multiple national assessments than it is to agree upon a single approach. Thus, the next iteration of national forest fragmentation assessments could include parallel analyses that do and do not incorporate road maps or recognize natural land-cover types as fragmenting agents. It will then be easier to shift attention toward the implications of these assessments instead of the methods that are used to conduct them.
Responses to this article are invited. If accepted for publication, your response will be hyperlinked to the article. To submit a comment, follow this link. To read comments already accepted, follow this link.
Funding for this research was provided by the Strategic Planning and Resource Assessment Staff of the U.S. Forest Service and by the Landscape Ecology Branch of the U.S. Environmental Protection Agency through an Interagency Agreement (DW12939283-01-0). The National Exposure Research Laboratory of the U.S. EPA supported J. Wickham's participation in this research. This paper was administratively reviewed by the U.S. EPA and approved for publication. The MRLC Consortium supplied the land-cover data, and the computing facilities were provided by the Center for Landscape Pattern Analysis. The authors thank two anonymous reviewers for helpful comments on an earlier version of the manuscript. Mention of trade names does not constitute endorsement or recommendation for use.
Achard, F., H. Eva, and P. Mayaux. 2001. Tropical forest mapping from coarse spatial resolution satellite data: production and accuracy assessment issues. International Journal of Remote Sensing 22:2741-2762.
Allen, T. F. H., R. V. O'Neill, and T. W. Hoekstra. 1987. Interlevel relations in ecological research and management: some working principles from hierarchy theory. Journal of Applied Systems Analysis 14:63-79.
Bailey, R. G. 1995. Descriptions of the ecoregions of the United States. Second edition. U.S. Forest Service Miscellaneous Publication 1391.
Bissonette, J. A., and I. Storch. 2002. Fragmentation: is the message clear? Conservation Ecology 6(2):14 [online] URL: http://www.ecologyandsociety.org/vol7/iss2/resp5.
Bogaert, J. 2003. Lack of agreement on fragmentation metrics blurs correspondence between fragmentation experiments and predicted effects. Conservation Ecology 7(1):r6. [online] URL: http://www.ecologyandsociety.org/vol7/iss1/resp6.
Foody, G. M. 2003. Remote sensing of tropical forest environments: towards the monitoring of environmental resources for sustainable development. International Journal of Remote Sensing 24:4035-4046.
Forman, R. T. T. 2000. Estimate of the area affected ecologically by the road system of the United States. Conservation Biology 14:31-35.
Forman, R. T. T., and L. E. Alexander. 1998. Roads and their major ecological effects. Annual Review of Ecology and Systematics 29:207-231.
Forman, R. T. T., D. Sperling, J. A. Bissonette, A. P. Clevenger, C. D. Cutshall, V. H. Dale, L. Fahrig, R. France, C. R. Goldman, K. Heanue, A. J. Jones, F. J. Swanson, T. Turrentine, and T. C. Winter. 2002. Road ecology: science and solutions. Island Press, Washington, D.C., USA.
Geographic Data Technology. 2002. Dynamap/2000 user manual. Geographic Data Technology, Lebanon, New Hampshire, USA.
Gustafson, E. J. 1998. Quantifying landscape spatial pattern: what is the state of the art? Ecosystems 1:143-156.
Heilman, G. E. Jr., J. R. Strittholt, N. C. Slosser, and D. A. Dellasala. 2002. Forest fragmentation of the conterminous United States: assessing forest intactness through road density and spatial characteristics. BioScience 52:411-422.
Heinz Center (The H. John Heinz III Center for Science, Economics and the Environment). 2002. The state of the nation's ecosystems: measuring the lands, waters, and living resources of the United States. Cambridge University Press, Cambridge, UK.
Jelinski, D. E., and J. Wu. 1996. The modifiable areal unit problem and implications for landscape ecology. Landscape Ecology 11:129-140.
Levin, S. A. 1992. The problem of pattern and scale in ecology. Ecology 73:1943-1967.
Mertens, K. C., L. P. C. Verbeke, T. Westra, and R. R. De Wulf. 2004. Sub-pixel mapping and sub-pixel sharpening using neural network predicted wavelet coefficients. Remote Sensing of Environment 91:225-236.
National Research Council. 1997. Toward a sustainable future: addressing the long-term effects of motor vehicle transportation on climate and ecology. National Academy Press, Washington, D.C., USA.
National Research Council. 2000. Ecological indicators for the nation. National Academy Press, Washington, D.C., USA.
O'Neill, R. V., C. T. Hunsaker, S. P. Timmins, B. L. Jackson, K. B. Jones, K. H. Riitters, and J. D. Wickham. 1996. Scale problems in reporting landscape pattern at the regional scale. Landscape Ecology 11:169-180.
Powell, R. L, N. Matzke, C. de Souza, M. Clark, I. Numata, L. L. Hess, and D. A. Roberts. 2004. Sources of error in accuracy assessment of thematic land-cover maps in the Brazilian Amazon. Remote Sensing of Environment 90:221-234.
Reed, R. A., J. Johnson-Barnard, and W. A. Baker. 1996. Contribution of roads to forest fragmentation in the Rocky Mountains. Conservation Biology 10:1098-1106.
Riitters, K. H., and J. D. Wickham. 2003. How far to the nearest road? Frontiers in Ecology and the Environment 1:125-129.
Riitters, K. H., J. D. Wickham, and J. W. Coulston. 2004. A preliminary assessment of Montreal Process indicators of forest fragmentation for the United States. Environmental Monitoring and Assessment 91:257-276.
Riitters, K. H., J. D. Wickham, R. V. O'Neill, K. B. Jones, E. R. Smith, J. W. Coulston, T. G. Wade, and J. H. Smith. 2002. Fragmentation of continental United States forests. Ecosystems 5:815-822.
Rogan, J., J. Miller, D. Stow, J. Franklin, L. Levien, and C. Fischer. 2003. Land-cover change monitoring with classification trees using Landsat TM and ancillary data. Photogrammetric Engineering and Remote Sensing 69:793-804.
Shouse, B. 2002. U.S. environment: report takes stock of knowns and unknowns. Science 297:2191.
Skole, D., and C. Tucker. 1993. Tropical deforestation and habitat fragmentation in the Amazon: satellite data from 1978–1988. Science 260:1905-1910.
Spellerberg, I. F. 1998. Ecological effects of roads and traffic: a literature review. Global Ecology and Biogeography Letters 7:317-333.
Trombulak, S. C., and C. A. Frissell. 2000. Review of ecological effects of roads on terrestrial and aquatic communities. Conservation Biology 14:18-30.
Turner, M. G., R. V. O'Neill, R. H. Gardner, and B. T. Milne. 1989. Effects of changing spatial scale on the analysis of landscape patterns. Landscape Ecology 3:153-162.
U.S. Department of Transportation. 2002. Highway statistics 2001. Federal Highway Administration, Office of Highway Policy Information. [online] URL: http://www.fhwa.dot.gov/ohim/hs01/aspublished/.
U.S. Environmental Protection Agency. 2002. 2000 national water quality inventory. U.S. Environmental Protection Agency, Office of Water, Report Number EPA-841-R-02-001. [online] URL: http://www.epa.gov/305b/2000report/.
U.S. Forest Service. 2004. National report on sustainable forests 2003. U.S. Forest Service Report FS-766. [online] URL: http://www.fs.fed.us/research/sustain/.
Vogelmann, J. E., S. M. Howard, L. Yang, C. R. Larson, B. K. Wylie, and N. Van Driel. 2001. Completion of the 1990s national land cover data set for the conterminous United States from Landsat Thematic Mapper data and ancillary data sources. Photogrammetric Engineering and Remote Sensing 67:650-662.
Wade, T. G., K. H. Riitters, J. D. Wickham, and K. B. Jones. 2003. Distribution and causes of global forest fragmentation. Conservation Ecology 7(2):7 [online] URL: http://www.ecologyandsociety.org/vol7/iss2/art7.
Wiens, J. A. 1989. Spatial scaling in ecology. Functional Ecology 3:385-397.
Wu, J., and R. Hobbs. 2002. Key issues and research priorities in landscape ecology: an idiosyncratic synthesis. Landscape Ecology 17:355-365.
Address of Correspondent:
Kurt Riitters
U.S. Forest Service
Southern Research Station
3041 Cornwallis Road
Research Triangle Park, North Carolina 27709 USA
Phone: (919) 549-4015
Fax: (919) 549-4047
kriitters@fs.fed.us
![]()